ESVIO: Event-based Stereo Visual Inertial Odometry
Introduction
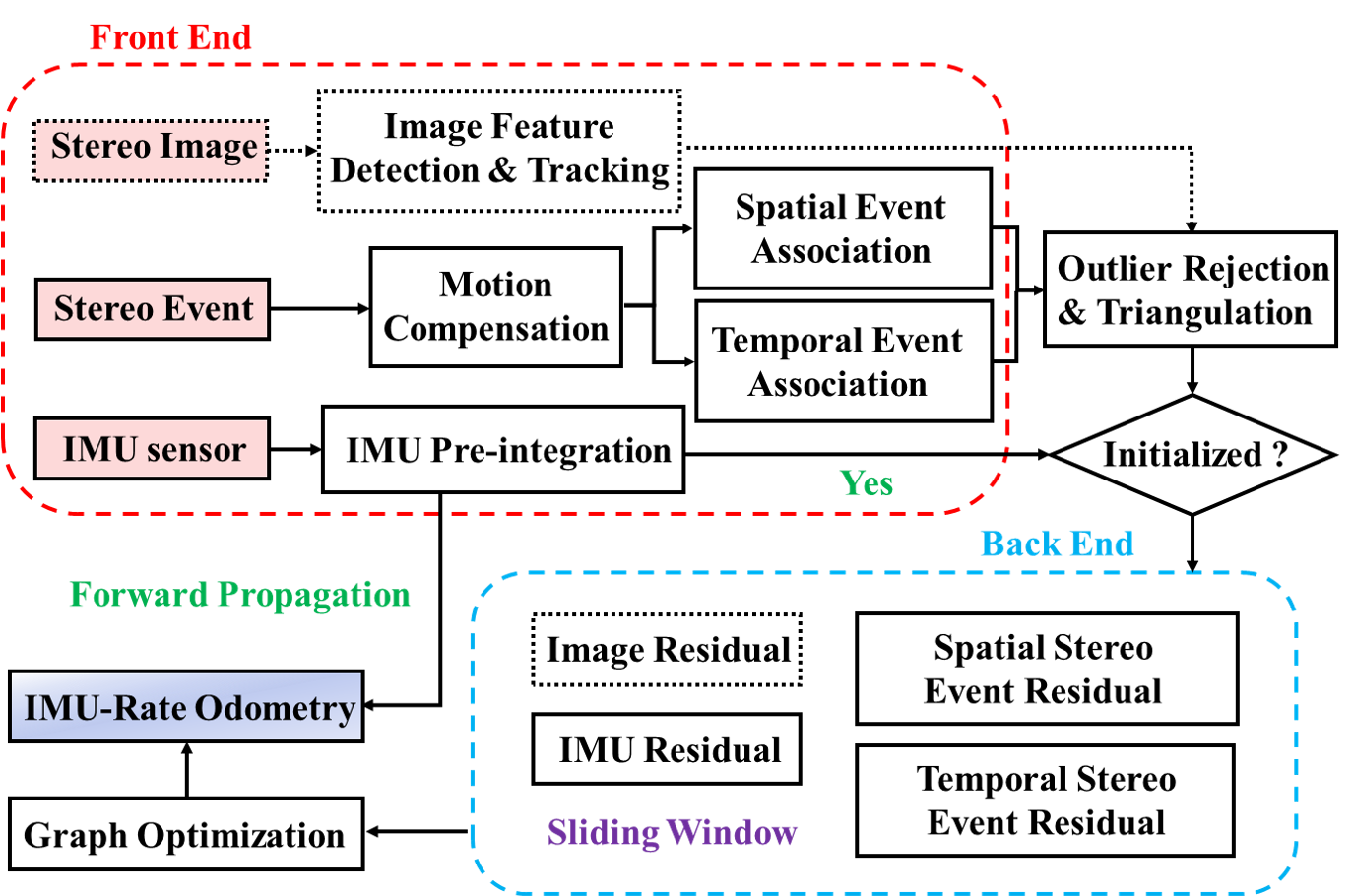
ESVIO is the first event-based stereo visual-inertial odometry, which leverages the complementary advantages of event streams, standard images, and inertial measurements. The pipeline includes the ESIO (purely event-based) and ESVIO (event with image-aided), which achieves spatial and temporal associations be- tween consecutive stereo event streams. A well-design back-end tightly-coupled fused the multi-sensor measurement to obtain robust state estimation under aggressive motion and HDR scenes. Below we demonstrates the structure of ESVIO and ESIO pipelines.
The video of ESVIO can be found as follow:
Evaluation
| Platforms | Sequences | Length(m) | ATE |
| A Handheld Device | Escalator | 77.460 | X |
| MCR normal dark | 76.499 | X | |
| MCR aggressive 6dof light | 100.871 | 0.279 | |
| Parkway loop night | 461.049 | 27.549 | |
| Forest | 130.937 | 1.923 | |
| A UGV | Elevator | 39.336 | X |
| Indoor loop | 270.674 | 10.990 | |
| MCR hdr | 193.918 | X | |
| Street day | 2064.475 | X | |
| Parkway loop night | 461.051 | X | |
| A QR | Underground | 98.312 | 5.676 |
| MCR hdr | 85.08 | 0.241 | |
| Forest | 108.037 | 0.479 | |
| A UAV | MCR loop light | 0.222 | LiDARs not supported |
| A Car | Urban night loop | 1807.884 | X |