PL-EVIO: Robust Monocular Event-based Visual Inertial Odometry with Point and Line Features
Introduction
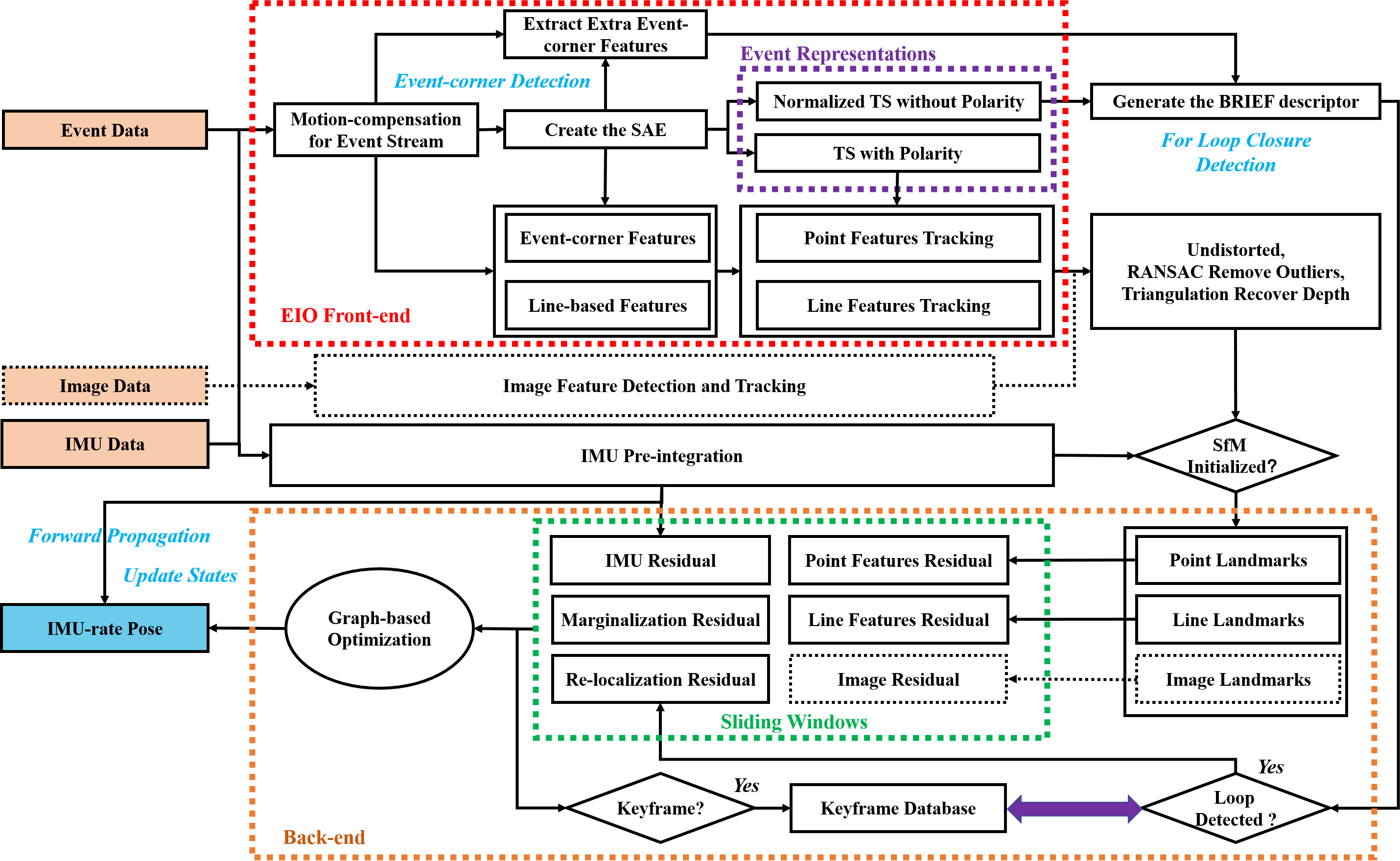
Pl-EVIO is a robust, high-accurate, and real-time optimization-based monocular event-based visual-inertial odometry (VIO) method with event-corner features, line-based event features, and point-based image features. This framework leverages the point-based features in the nature scene and line-based features in the human-made scene to provide more additional structure and constraints through well-design feature management. The following demonstrates the overview of PL-EVIO framework.
The video of PL-EVIO can be found as follow: