Quadruped_robot
Introduction
Compared to open environments such as highways and roads in unmanned vehicles and autonomous driving, there are a large number of complex terrain, narrow spaces, and unstable environments in the real world. Multi sensor localization and mapping in these scenarios has always been a challenging problem. A quadruped robot with excellent mobility and dynamic motion ability can climb large obstacles and run dynamically, which provides the possibility for robots to work in SLAM in complex real-world environments. Based on this, M3DSS Quadruped robot introduced a comprehensive dataset aimed at accelerating SLAM research in urban scenarios. In addition to LiDAR and RGB cameras, this dataset also includes four event cameras to enhance the collection of visual information. It includes sensor measurements from LiDAR, RGB cameras, event cameras, and IMUs, as well as accurate indoor and outdoor ground truth data obtained from GNSS and Vicon systems. Unlike existing event camera based Quadruped_robot datasets, M3DSS quadruped robot emphasizes many complex natural scenes such as forests and mountains, and already contains high and low texture indoor and outdoor scenes.
Sensor list
(1)3D Mechanical LiDAR(VLP-32C)
Frequency:
10Hz
FOV:
360°(Horizontal),-25°~15°(Vertical)
Beam:
32
Distance:
up to 200m
(1)3D Mechanical LiDAR(VLP-32C)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),-25°~15°(Vertical) |
Beam: |
32 |
Distance: |
up to 200m |
(2)Solid-state LiDAR (Livox Mid-360)
Frequency:
10Hz
FOV:
360°(Horizontal),59°(Vertical)
Distance:
up to 70m
(2)Solid-state LiDAR (Livox Mid-360)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),59°(Vertical) |
Distance: |
up to 70m |
(3)RGB-D Camera (Lslidar C16)
Frequency:
30Hz
Resolution:
1280*720 pixel
FOV:
87°(Horizontal),58°(Vertical)
(3)RGB-D Camera (Lslidar C16)
Frequency: |
30Hz |
Resolution: |
1280*720 pixel |
FOV: |
87°(Horizontal),58°(Vertical) |
(6)RGB Camera (Hikrobot MV-CI003-GL-N6)
Frequency:
20Fps
Resolution:
1440*1080 pixel
FOV:
96.8°(Horizontal),79.4°(Vertical)
(6)RGB Camera (Hikrobot MV-CI003-GL-N6)
Frequency: |
20Fps |
Resolution: |
1440*1080 pixel |
FOV: |
96.8°(Horizontal),79.4°(Vertical) |
(7)Event Camera
Inivation DAVIS346-color:
Quantity:
X2
Inivation DVXplorer:
Quantity:
X2
Frequency:
1000Hz
Frequency:
1000Hz
Resolution:
346×260 pixel
Resolution:
640×480 pixel
IMU:
MPU6150, 6-axis
IMU:
MPU6150, 6-axis
(7)Event Camera
Inivation DAVIS346-color: |
Quantity: |
X2 |
Inivation DVXplorer: |
Quantity: |
X2 |
|
Frequency: |
1000Hz |
Frequency: |
1000Hz |
|||
Resolution: |
346×260 pixel |
Resolution: |
640×480 pixel |
|||
IMU: |
MPU6150, 6-axis |
IMU: |
MPU6150, 6-axis |
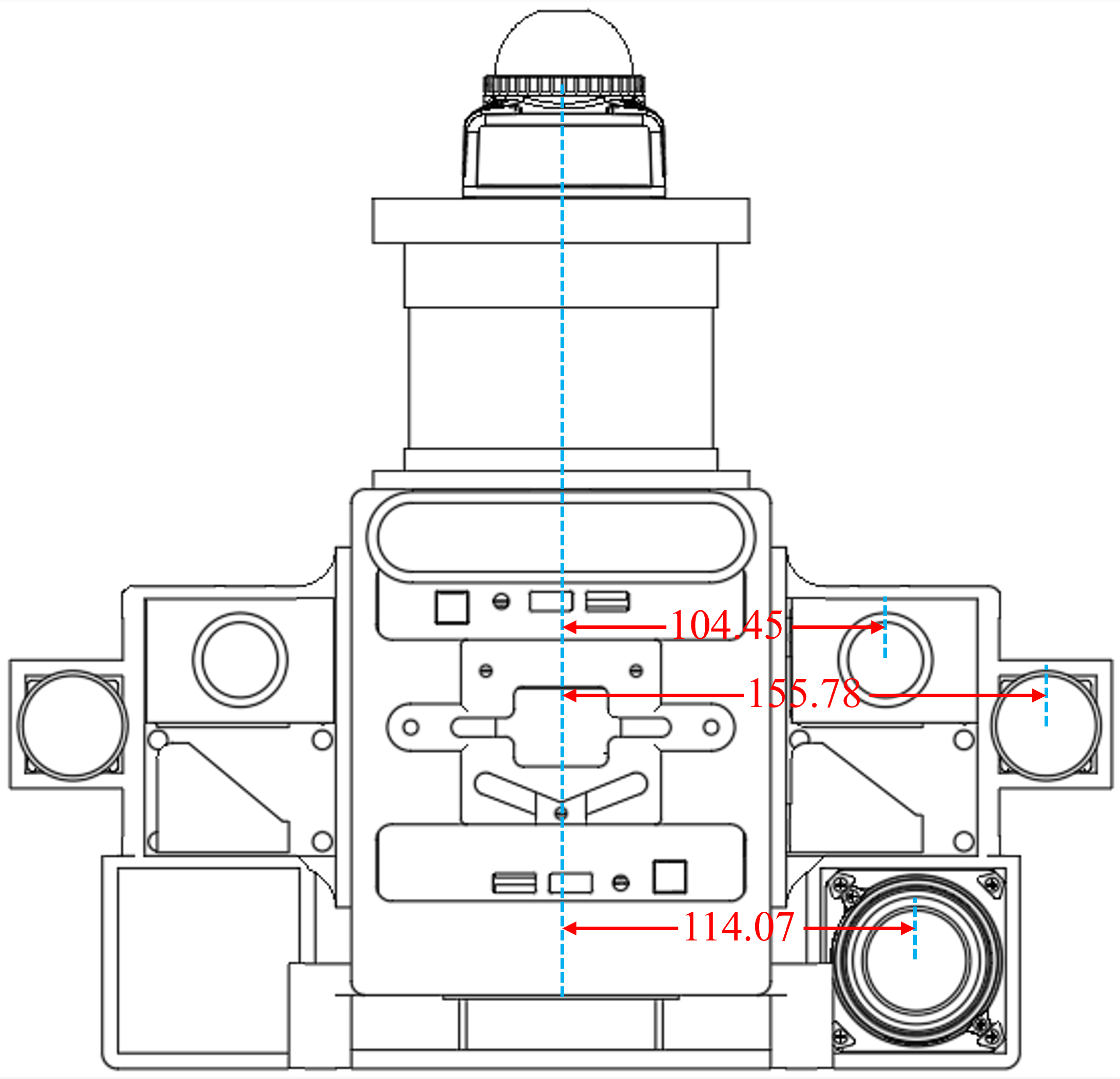
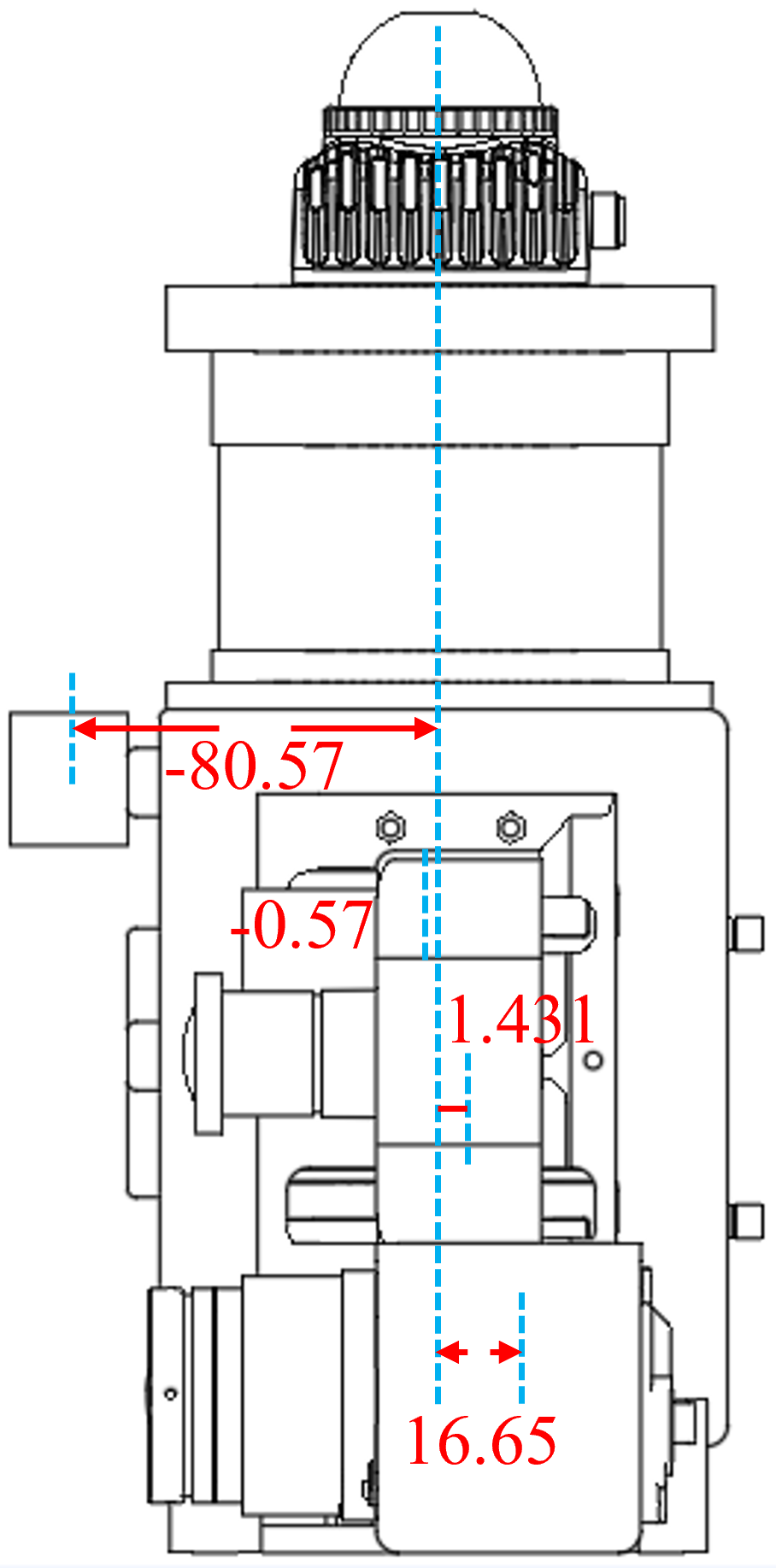
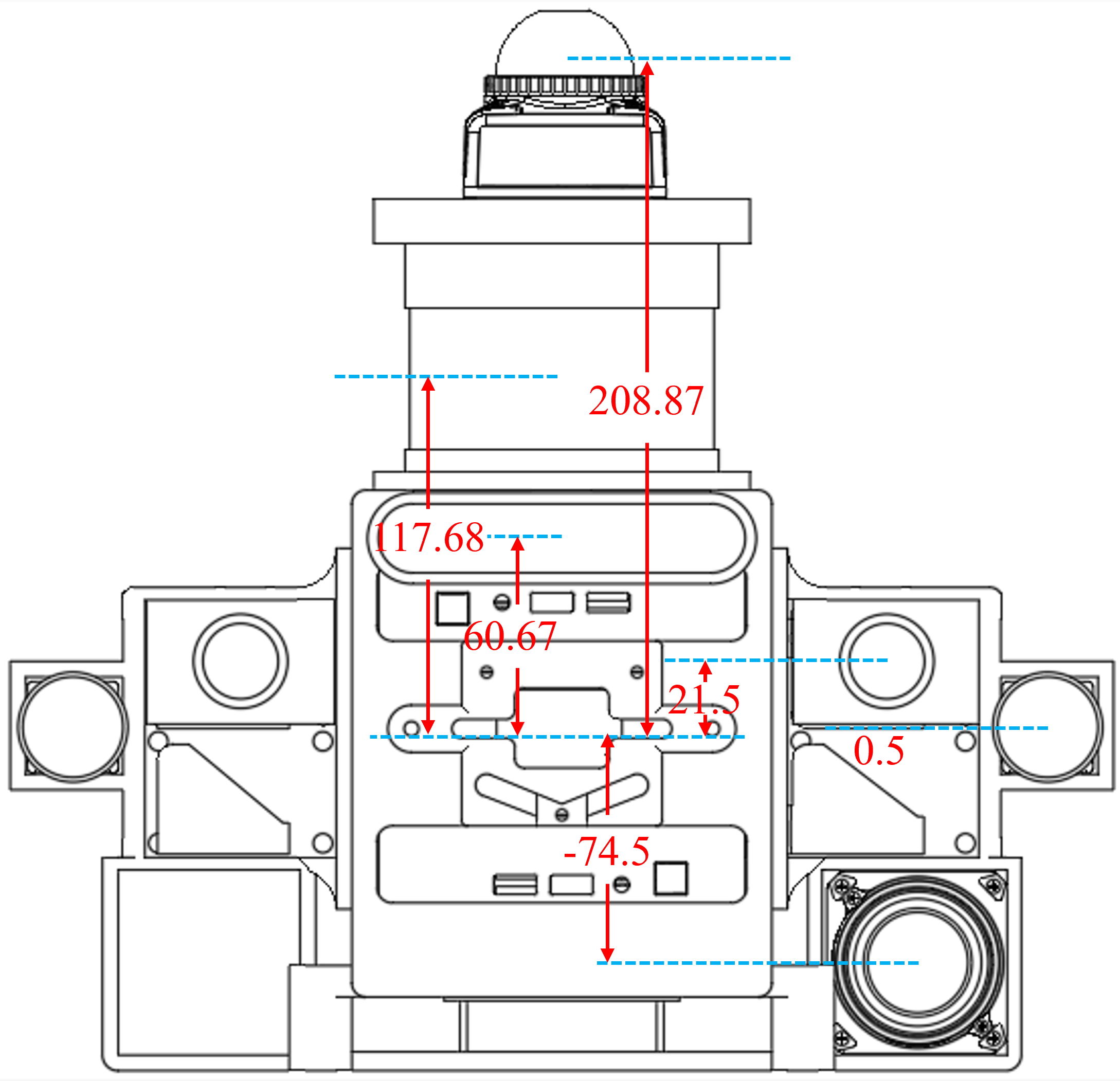
Sensor setups

CAD drawings
Calibration rosbag and Our calibration result
title1 |
title2 |
title3 |
title4 |
|---|---|---|---|
 |
 |
|
|
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Our calibration result:txt
Data
Parkway_loop_day |
Parkway_loop_night |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Forest |
Underground |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Indoor_loop |
Corridor |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Elevator |
MCR_light |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
MCR_dark |
MCR_hdr |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
All topics published by quadruped robot platform
| Sensors | Topics |
|---|---|
| Event cameras | /DAVIS346_left/events |
| /DAVIS346_left/image | |
| /DAVIS346_left/imu | |
| /DAVIS346_right/events | |
| /DAVIS346_right/image | |
| /DAVIS346_right/imu | |
| IMU | /IMU_data |
| VI-sensor | /camera/infra1/image_rect_raw |
| /camera/infra2/image_rect_raw | |
| Infrared camera | /hikrobot_infrared_camera/rgb |
| RGB cameras | /hikrobot_left_camera/rgb |
| /hikrobot_right_camera/rgb | |
| Solid-State LiDAR | /livox/imu |
| /livox/lidar | |
| Mechanical LiDAR | /velodyne_packets |
| /velodyne_points | |
| NOKOV ground truth (part) | /vrpn_client_node/Trackerxx/pose |