ORB-SLAM3 Evaluation
Introduction
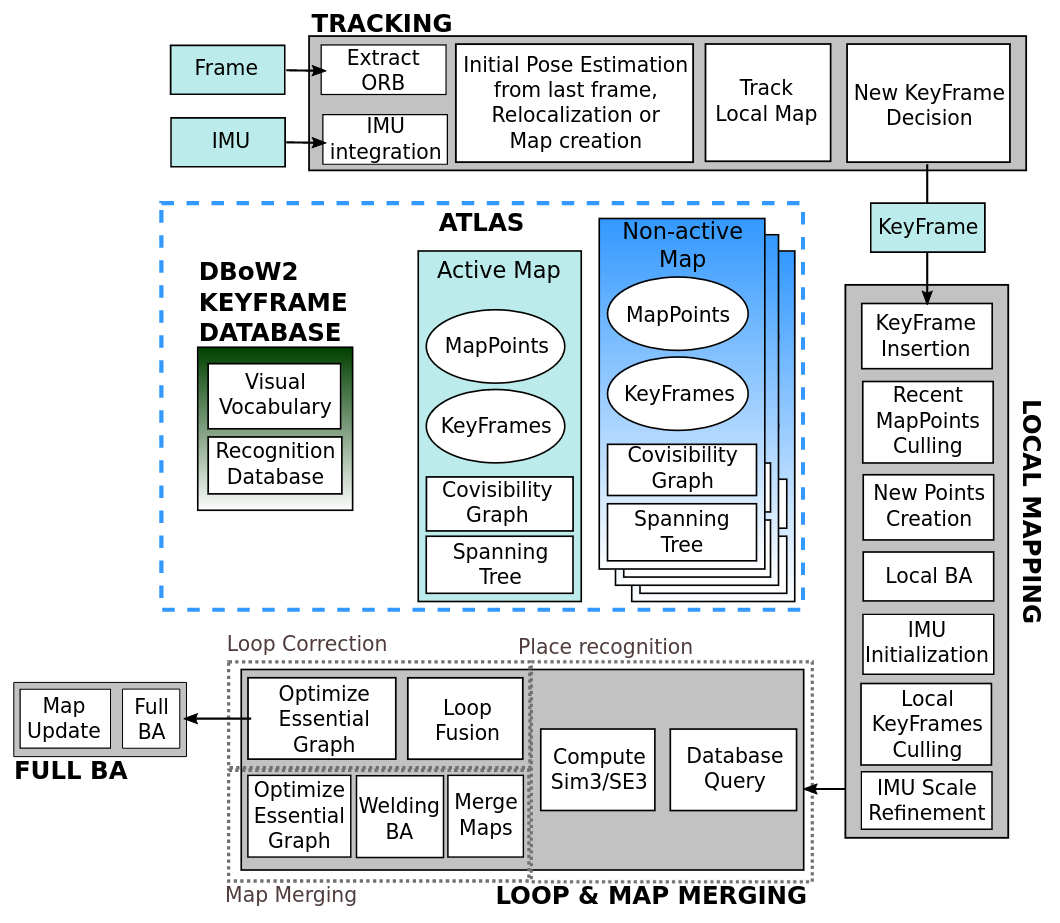
1 The overview of ORB-SLAM3
ORB-SLAM3 is the first system able to perform visual, visual-inertial and multi-map SLAM with monocular, stereo and RGB-D cameras, using pin-hole and fisheye lens models. The first main novelty is a feature-based tightly-integrated visual-inertial SLAM system that fully relies on Maximum-a-Posteriori (MAP) estimation, even during the IMU initialization phase. The second main novelty is a multiple map system that relies on a new place recognition method with improved recall. code link. paper link.
2 ORB-SLAM3 Compilation Process
2.1 Requirement
(1)This package uses use the new thread and chrono functionalities of C++11.
(2)This package uses Pangolin for visualization and user interface .
(3)This package uses OpenCV to manipulate images and features. Required at leat 3.0.
(4)Eigen3 required by g2o. Required at least 3.1.0.
(5)This package uses modified versions of the DBoW2 library to perform place recognition and g2o library to perform non-linear optimizations.
(6)ROS Melodic
2.2 Build ORB-SLAM3
Clone the repository:
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git ORB_SLAM3
This package provides a script build.sh to build the Thirdparty libraries and ORB-SLAM3. Please make sure you have installed all required dependencies. Execute:
cd ORB_SLAM3
chmod +x build.sh
./build.sh
This will create libORB_SLAM3.so at lib folder and the executables in Examples folder.
Evaluation
| Platforms | Sequences | Length(m) | ATE |
| A Handheld Device | Escalator | 77.460 | 1.852 |
| MCR normal dark | 76.499 | X | |
| MCR aggressive 6dof light | 100.871 | 2.854 | |
| Parkway loop night | 461.049 | 32.194 | |
| Forest | 130.937 | 1.324 | |
| A UGV | Elevator | 39.336 | X |
| Indoor loop | 270.674 | 1.359 | |
| MCR hdr | 193.918 | 8.527 | |
| Street day | 2064.475 | 12.276 | |
| Parkway loop night | 461.051 | X | |
| A QR | Underground | 98.312 | 1.227 |
| MCR hdr | 85.08 | 0.107 | |
| Forest | 108.037 | 0.643 | |
| A UAV | MCR loop light | 104.989 | 1.134 |
| A Car | Urban night loop | 1807.884 | 17.645 |