UGV
Introduction
The UGV platform adopts scenes suitable for unmanned vehicles, mainly collecting on flat ground, including outdoor and indoor scenes, and records under different lighting conditions. To ensure enough data is captured in different scenarios, our platform includes multiple sensors, including 3D mechanical lidar, solid-state lidar, RGB-D camera, IMU, GNSS/INS-RTK (outdoor), RGB camera and four event camera. The sensor setup is similar to M3DSS Quadruped_robot , enhancing the versatility and ease of use of our dataset.
Sensor list
(1)3D Mechanical LiDAR(VLP-32C)
Frequency:
10Hz
FOV:
360°(Horizontal),-25°~15°(Vertical)
Beam:
32
Distance:
up to 200m
(1)3D Mechanical LiDAR(VLP-32C)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),-25°~15°(Vertical) |
Beam: |
32 |
Distance: |
up to 200m |
(2)Solid-state LiDAR (Livox Mid-360)
Frequency:
10Hz
FOV:
360°(Horizontal),59°(Vertical)
Distance:
up to 70m
(2)Solid-state LiDAR (Livox Mid-360)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),59°(Vertical) |
Distance: |
up to 70m |
(3)RGB-D Camera (D455)
Frequency:
30Hz
Resolution:
1280*720 pixel
FOV:
87°(Horizontal),58°(Vertical)
(3)RGB-D Camera (D455)
Frequency: |
30Hz |
Resolution: |
1280*720 pixel |
FOV: |
87°(Horizontal),58°(Vertical) |
(6)RGB Camera (Hikrobot MV-CI003-GL-N6)
Frequency:
20Fps
Resolution:
1440*1080 pixel
FOV:
96.8°(Horizontal),79.4°(Vertical)
(6)RGB Camera (Hikrobot MV-CI003-GL-N6)
Frequency: |
20Fps |
Resolution: |
1440*1080 pixel |
FOV: |
96.8°(Horizontal),79.4°(Vertical) |
(7)Event Camera
Inivation DAVIS346-color:
Quantity:
X2
Frequency:
1000Hz
Resolution:
346×260 pixel
IMU:
MPU6150, 6-axis
(7)Event Camera
Inivation DAVIS346-color: |
Quantity: |
X2 |
|
Frequency: |
1000Hz |
||
Resolution: |
346×260 pixel |
||
IMU: |
MPU6150, 6-axis |
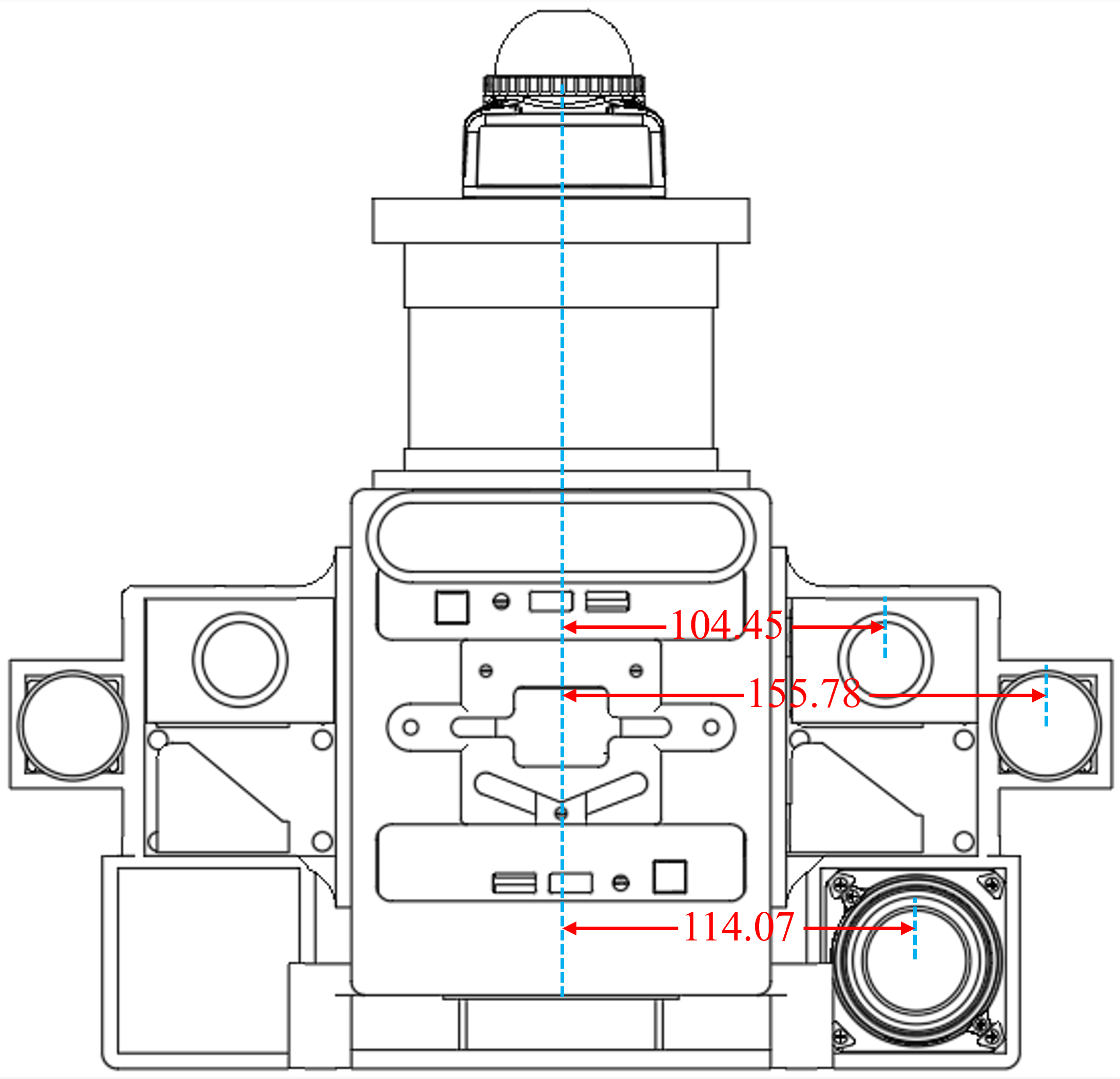
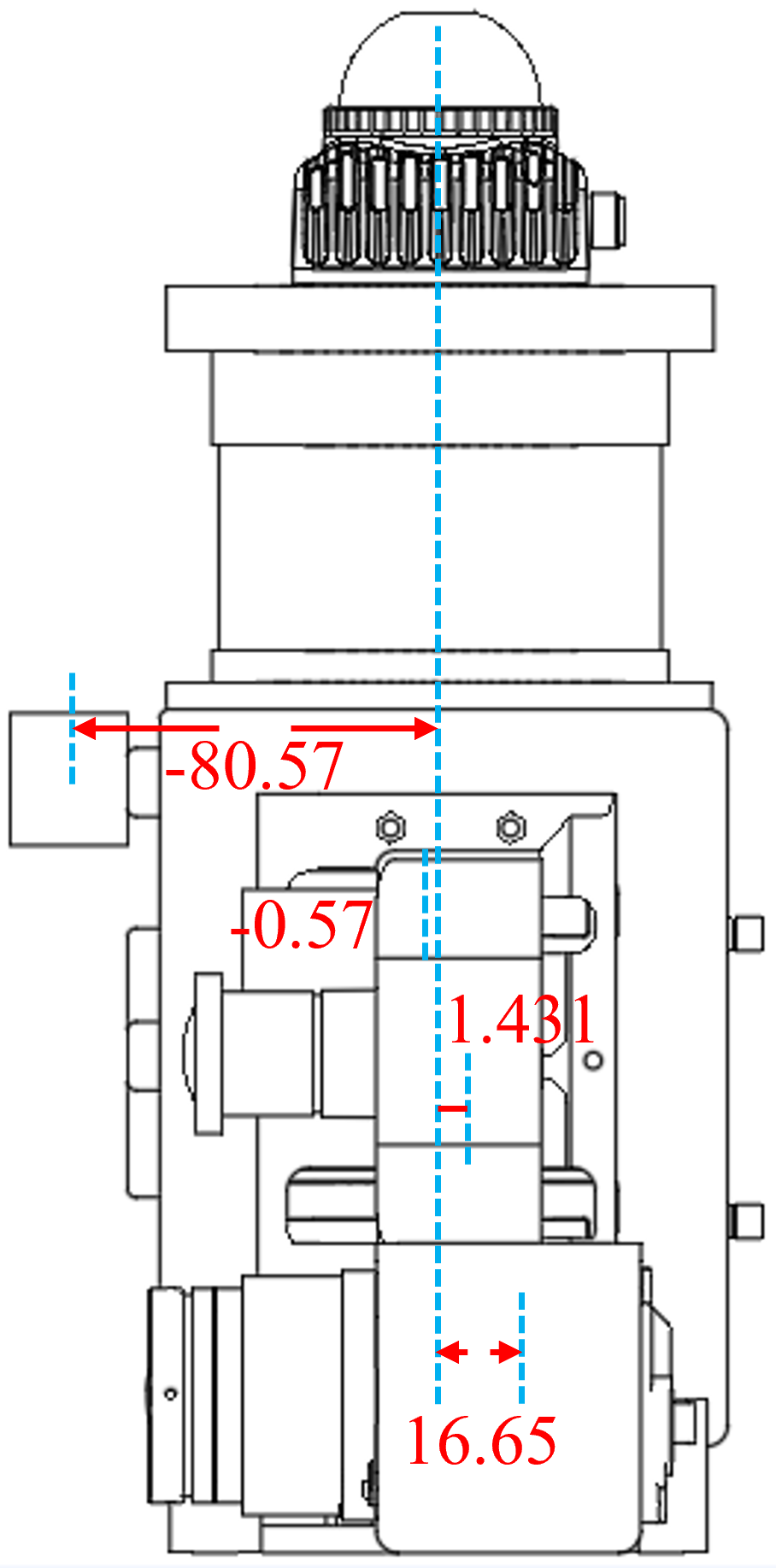
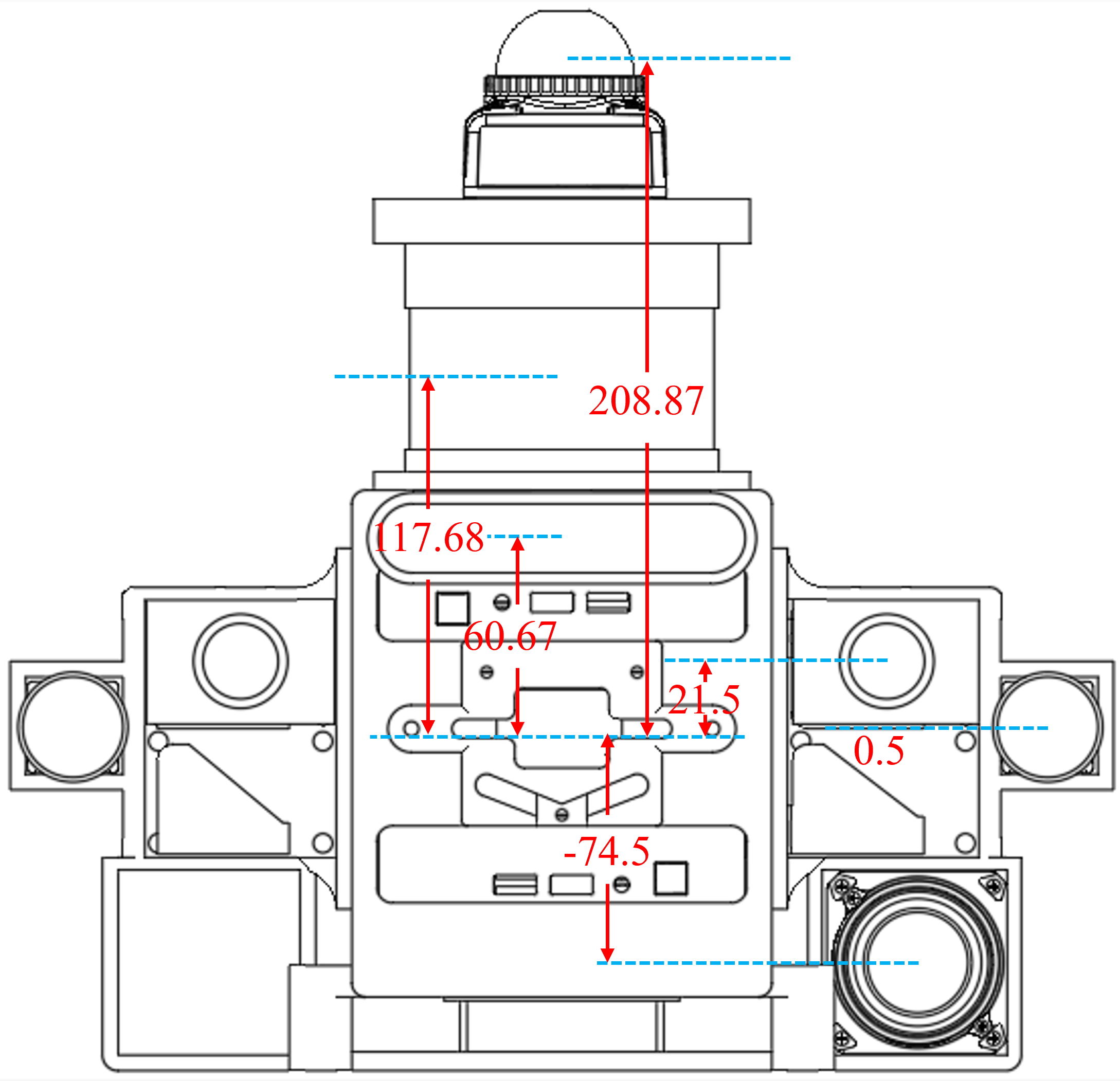
Sensor setups

CAD drawings
Calibration rosbag and Our calibration result
title1 |
title2 |
title3 |
title4 |
|---|---|---|---|
 |
|
|
|
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Our calibration result:txt
Data
Street_day |
Street_night |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Parkway_loop_day |
Parkway_loop_night |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Parkway_eight_loop_day |
Parkway_eight_loop_night |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Indoor loop |
Indoor aggressive circle |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Corridor |
Underground |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
Elevator |
MCR normal loop light |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
MCR normal loop dark |
MCR normal loop hdr |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
MCR aggressive loop light |
MCR aggressive loop dark |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
MCR aggressive loop hdr |
||
|---|---|---|
|
||
|
|
||
Data: rosbag |
Groud-Truth: rosbag |
|
All topics published by UGV platform
| Sensors | Topics |
|---|---|
| Event cameras | /DAVIS346_left/events |
| /DAVIS346_left/image | |
| /DAVIS346_left/imu | |
| /DAVIS346_right/events | |
| /DAVIS346_right/image | |
| /DAVIS346_right/imu | |
| IMU | /IMU_data |
| VI-sensor | /camera/infra1/image_rect_raw |
| /camera/infra2/image_rect_raw | |
| Infrared camera | /hikrobot_infrared_camera/rgb |
| RGB cameras | /hikrobot_left_camera/rgb |
| /hikrobot_right_camera/rgb | |
| Solid-State LiDAR | /livox/imu |
| /livox/lidar | |
| Mechanical LiDAR | /velodyne_packets |
| /velodyne_points | |
| NOKOV ground truth (part) | /vrpn_client_node/Trackerxx/pose |