ROS Uart Package of GNSS
1 The overview of our GNSS/INS-RTK
The GNSS/INS-RTK that we use is the CH310S_4G of HiPNUC. CH310S is a high-performance and high-precision single antenna GNSS/INS-RTK integrated navigation system that utilizes high-performance IMU, full frequency RTK-GNSS system, odometer and other sensors, and is equipped with self-developed data fusion algorithms. It can output real-time navigation information such as position, speed, and attitude timing.
2 GIR_uart Compilation Process
We have designed a ROS package based on the serial port protocol of CH310S_4G, which can read and convert serial port information into rostopic. Here are the steps to compile and use the GIR_uart:
2.1 Requirement
(1)This package uses serial.
sudo apt-get install ros-[your ros edition]-serial
2.2 Build GIR_uart
cd ~/catkin_ws/src
git clone https://github.com/Huang-shulei/GIR_uart.git
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
2.3 Run GIR_uart
rosrun GIR_uart uart_node
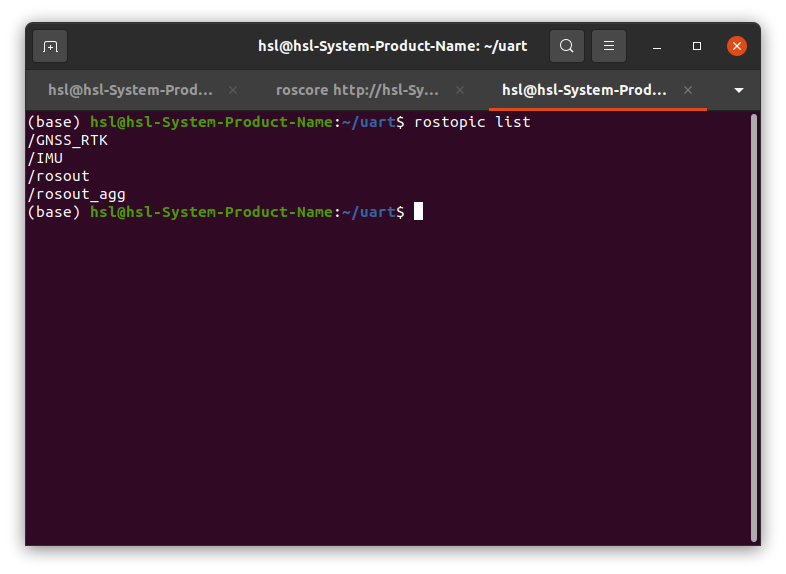
3 The topic list of GIR_uart
/IMU (Raw information of 6-axis IMU)
/GNSS_RTK (RTK positioning information, including longitude, latitude, and altitude)