Infrared camera drive
1 Environment configuration
1.1 Download package
(1)mkdirs catkin_ws/src
(2)cd catkin_ws/src
(3)git clone https://github.com/ERGlab/infrared_camera_ros.git
1.2 MVS Client installation
(1)Download MVS Client. download link.
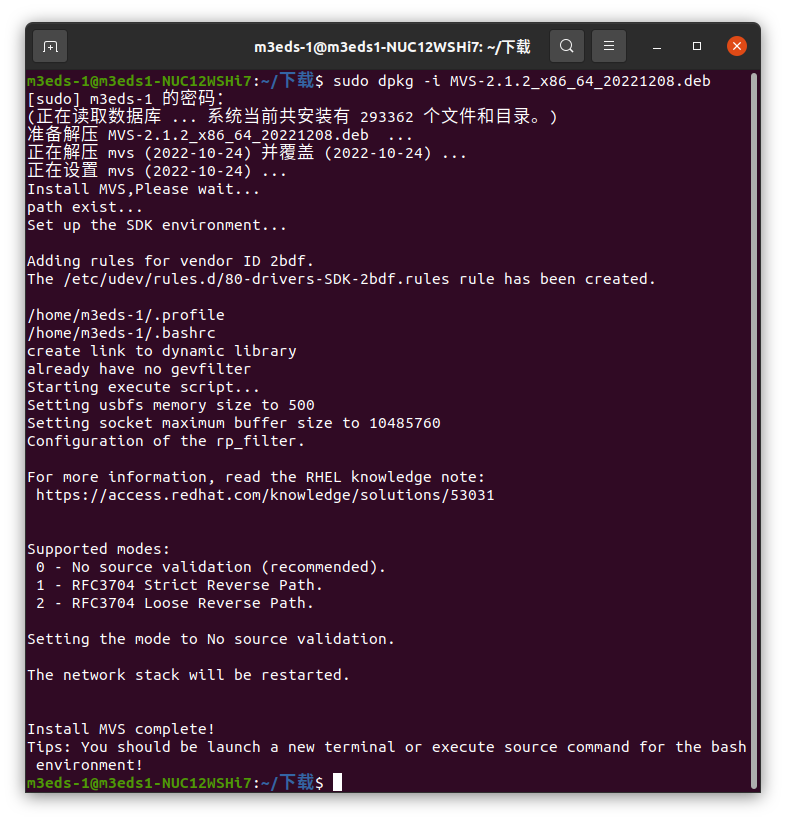
(2)Open this compressed package and install a suitable edition for your computer
sudo dpkg install -i MVS-2.1.2_x86_64_20221208.deb (for example)
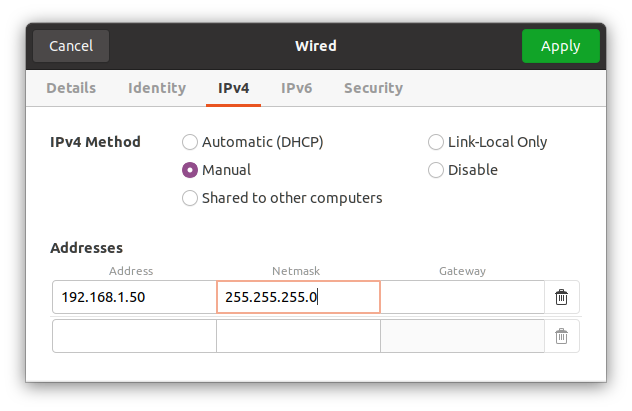
1.3 Camera ethernet ip configuration
Set the Camera Ethernet IP to "manual" and refer to the following figure for the configuration of the IP address.
2 Compile
(1)cd ~/catkin_ws
(2)catkin_make
(3)source devel/setup.bash
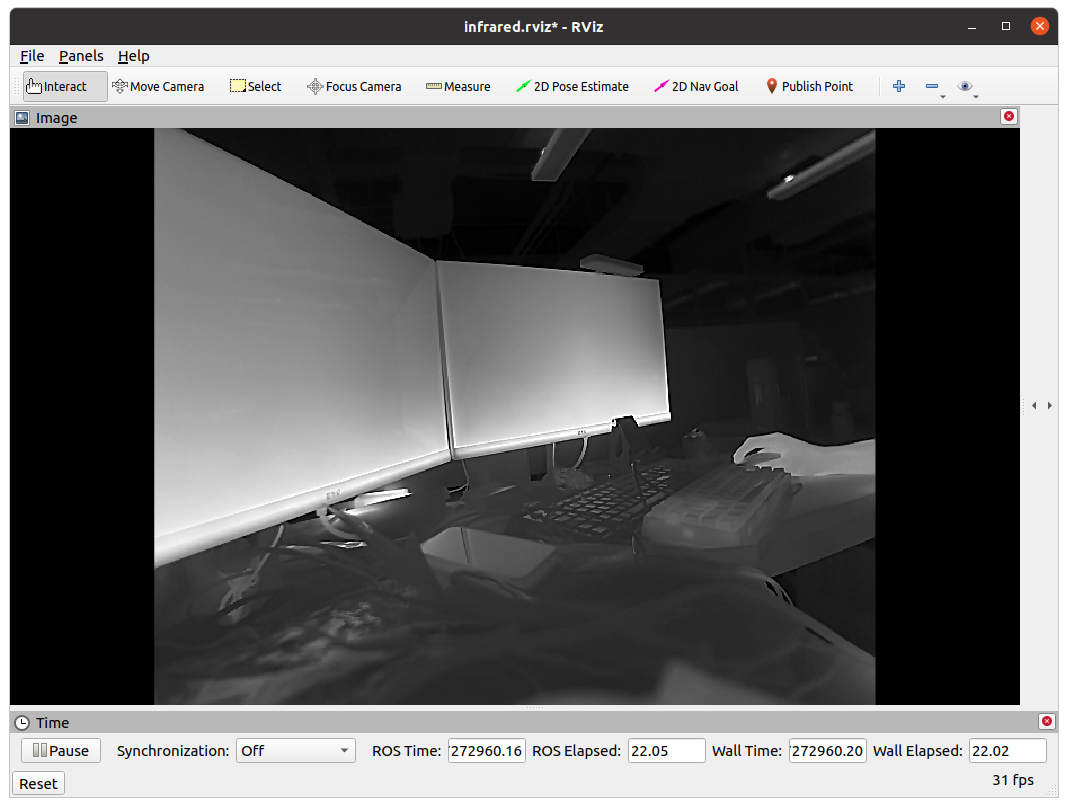
3 Run
(1)roslaunch hikrobot_infrared_camera infrared_camera.launch
(2)roslaunch hikrobot_infrared_camera infrared_camera_rviz.launch (Visualization)