EVO: A Geometric Approach to Event-Based 6-DOF Parallel Tracking and Mapping in Real Time
Introduction
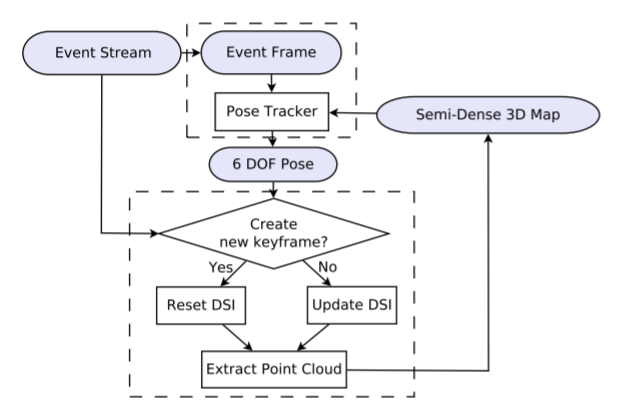
EVO was an event-based visual odometry pipeline that successfully leveraged both the high temporal resolution and high dynamic range capabilities of event cameras.
This algorithm successfully leveraged the outstanding properties of event cameras to track fast camera motions while recovering a semidense three-dimensional (3-D) map of the environment.
The implementation could run in real time on a standard CPU and outputs up to several hundred pose estimates per second.
Due to the nature of event cameras, this algorithm was unaffected by motion blur and operated very well in challenging,
high dynamic range conditions with strong illumination changes.
Here are some reference links:
code link.
paper link.
vedio link.
installation
You can refer to this link : reference.