Mid-360 Driver
1. Abstract
In this report, we will provide a brief overview of our MID-360 Driver configuration process. This primarily involves download and compile the SDK and driver, configuring Ethernet, display point clouds and topics.
2. SDK and driver
View official introduction
https://github.com/Livox-SDK
Livox SDK and Livox_ ROS_ Driver: Drivers for receiving LiDAR data and more,
support Lidar Mid-40, Mid-70, Tele-15, Horizon, Avia.
Livox SDK2 and Livox_ROS_Driver2: Drivers for receiving LiDAR data and controlling lidar,
support Lidar HAP and Mid-360!
So we need to download Livox SDK2 and Livox_ROS_Driver2.
Install Livox-SDK2:
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake .. && make -j
sudo make install
Install livox_ros_driver2:
cd ws_livox
source /opt/ros/noetic/setup.sh
./build.sh ROS1
3. Configuring Ethernet
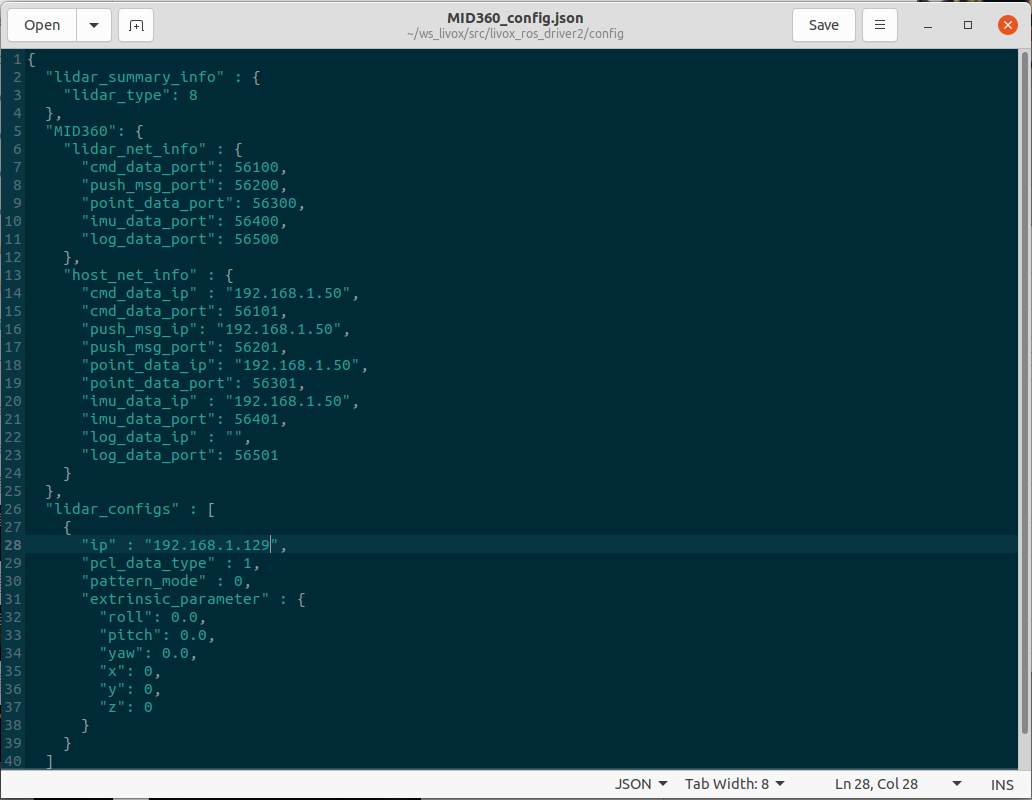
Firstly, under Ubuntu 20.04, place the local IP address on the same local area network as the LIDAR IP, and then change the IP address of the Ethernet and modify livox_ROS_Driver2/config/MID360_config.json.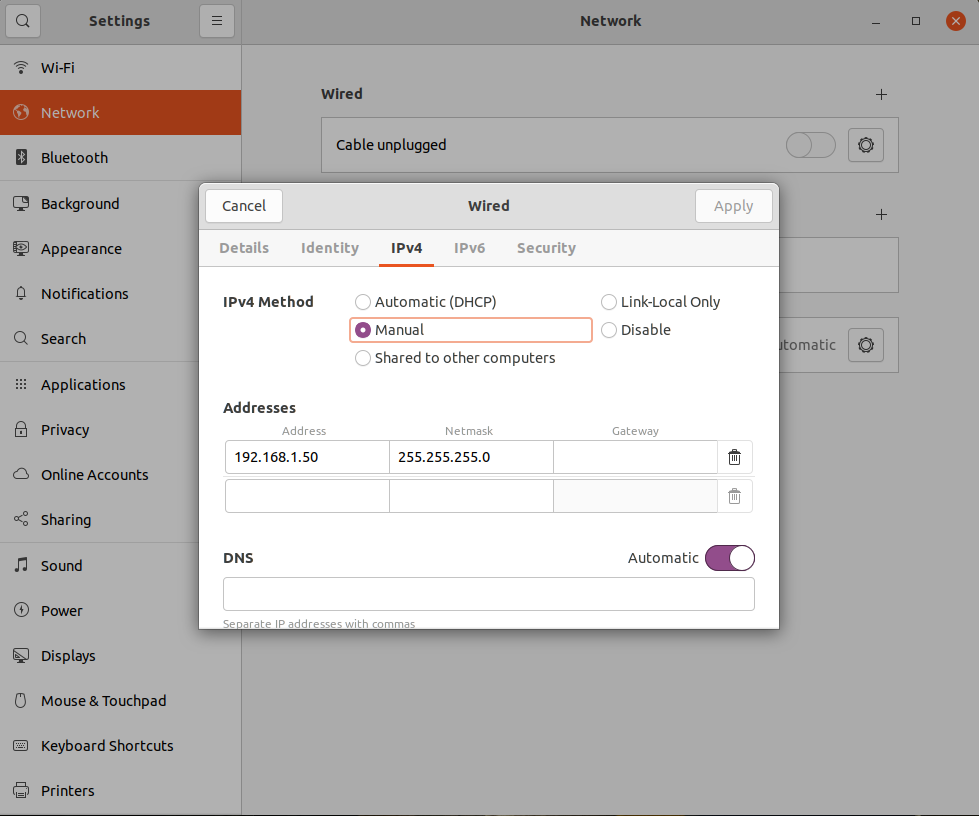
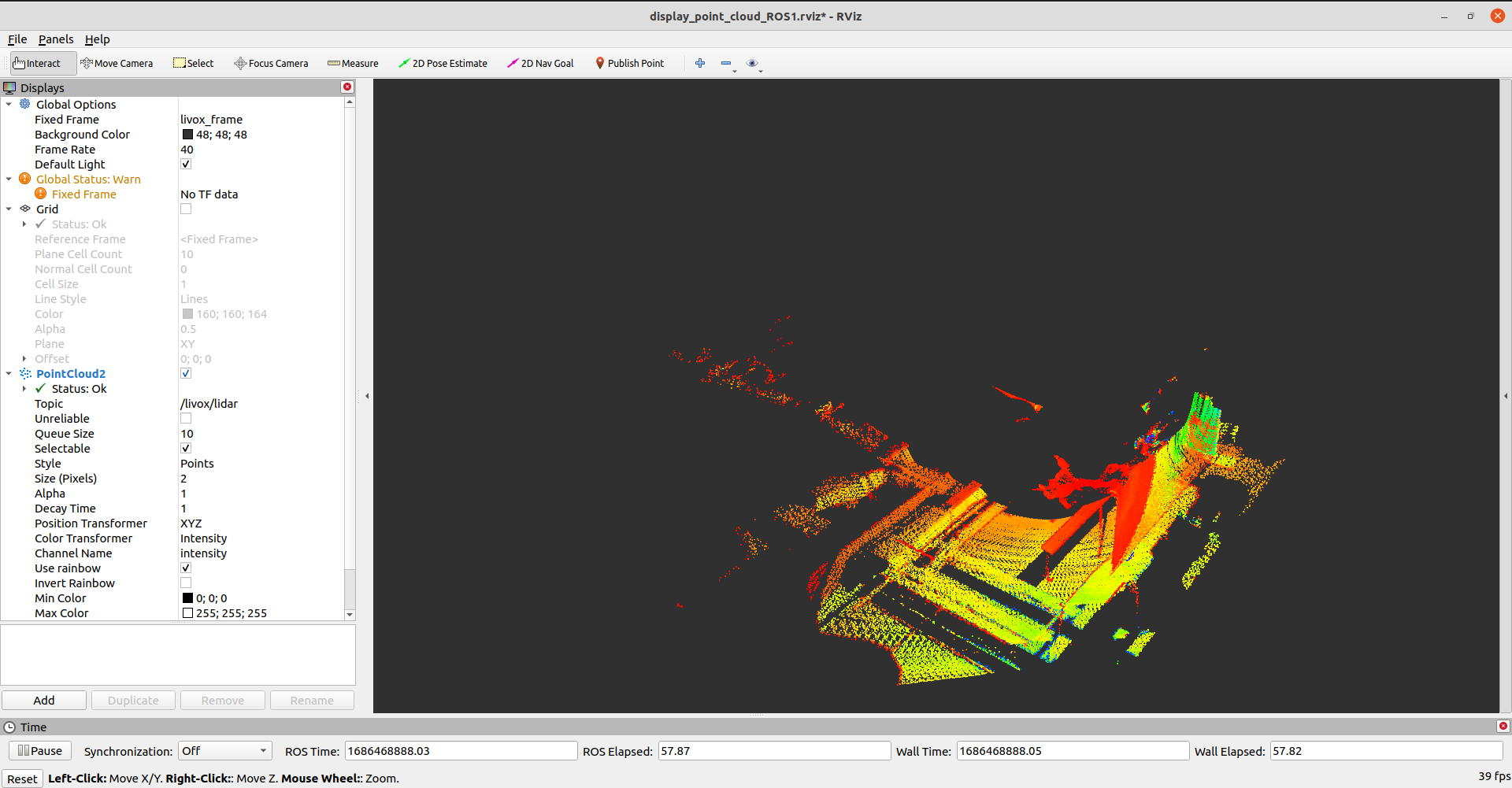
4. Display point clouds and topics
Once the compilation is successful, the launch file can be run and the point cloud will be displayed, and the LIDAR data and laser data can be released normally.
roslaunch livox_ros_driver2 msg_MID360.launch
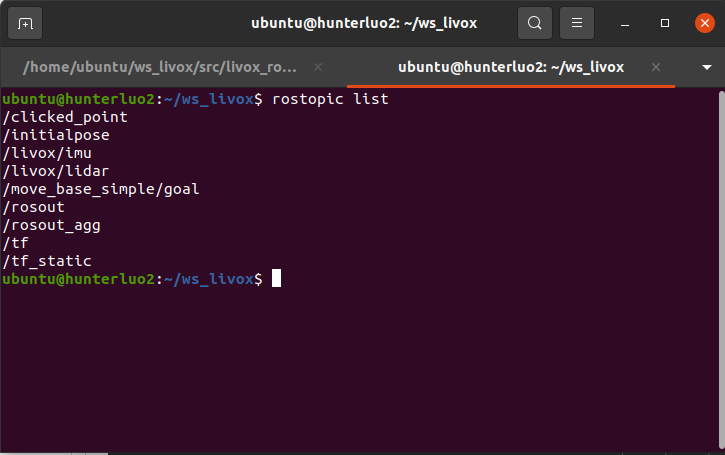
rostopic list