VINS-Fusion Evaluation
Introduction
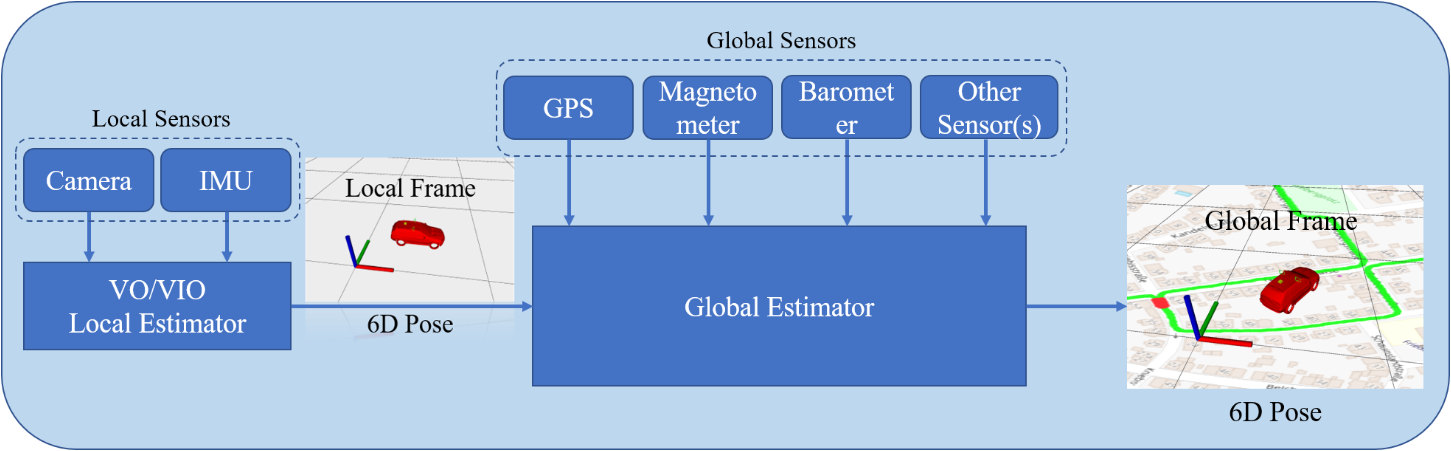
1 The overview of VINS-Fusion
VINS-Fusion is a sensor fusion framework to fuse local states with global sensors, which achieves locally accurate and globally drift-free pose estimation and achieves accurate self-localization for autonomous applications (drones, cars, and AR/VR). Local estimations, produced by existing VO/VIO approaches, are fused with global sensors in a pose graph optimization. Within the graph optimization, local estimations are aligned into a global coordinate. Meanwhile, the accumulated drifts are eliminated. VINS-Fusion is an extension of VINS-Mono, which supports multiple visual-inertial sensor types (mono camera + IMU, stereo cameras + IMU, even stereo cameras only). code link. paper link.
2 VINS-Fusion Compilation Process
2.1 Requirement
(1)This package requires Ubuntu 64-bit 16.04 or 18.04. ROS Kinetic or Melodic.
(2)This package requires Ceres.
2.2 Build VINS-Fusion
Clone the repository and catkin_make:
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
if you fail in this step, try to find another computer with clean system or reinstall Ubuntu and ROS
Evaluation
| Platforms | Sequences | Length(m) | ATE |
| A Handheld Device | Escalator | 77.460 | 0.746 |
| MCR normal dark | 76.499 | 0.377 | |
| MCR aggressive 6dof light | 100.871 | 2.373 | |
| Parkway loop night | 461.049 | 25.894 | |
| Forest | 130.937 | 0.933 | |
| A UGV | Elevator | 39.336 | X |
| Indoor loop | 270.674 | 0.767 | |
| MCR hdr | 193.918 | 7.459 | |
| Street day | 2064.475 | 51.820 | |
| Parkway loop night | 461.051 | 12.964 | |
| A QR | Underground | 98.312 | 0.659 |
| MCR hdr | 85.08 | 0.573 | |
| Forest | 108.037 | 0.301 | |
| A UAV | MCR loop light | 104.989 | 0.041 |
| A Car | Urban night loop | 1807.884 | 33.386 |