Driving
Introduction
Multi-sensor fusion for localization and mapping in urban is still a challenging problem. Urban scenes are characterized by numerous dynamic objects and frequent lighting variations, which adversely affect the performance of cameras and lidar systems. Furthermore, the presence of high-rise buildings poses a serious obstacle to the accuracy of GNSS. To address these challenges, M3DSS-Driving introduces a comprehensive dataset aimed at accelerating SLAM research in urban scenes. In addition to lidar and RGB cameras, this dataset incorporates four event cameras to enhance the collection of visual information. It includes sensor measurements from LiDAR, RGB cameras, event cameras, and IMUs, along with precise ground truth data obtained from the SPAN-CPT system. Unlike existing event camera-based driving datasets, M3DSS-Driving specifically emphasizes urban scenes, particularly those that are more challenging in nature.
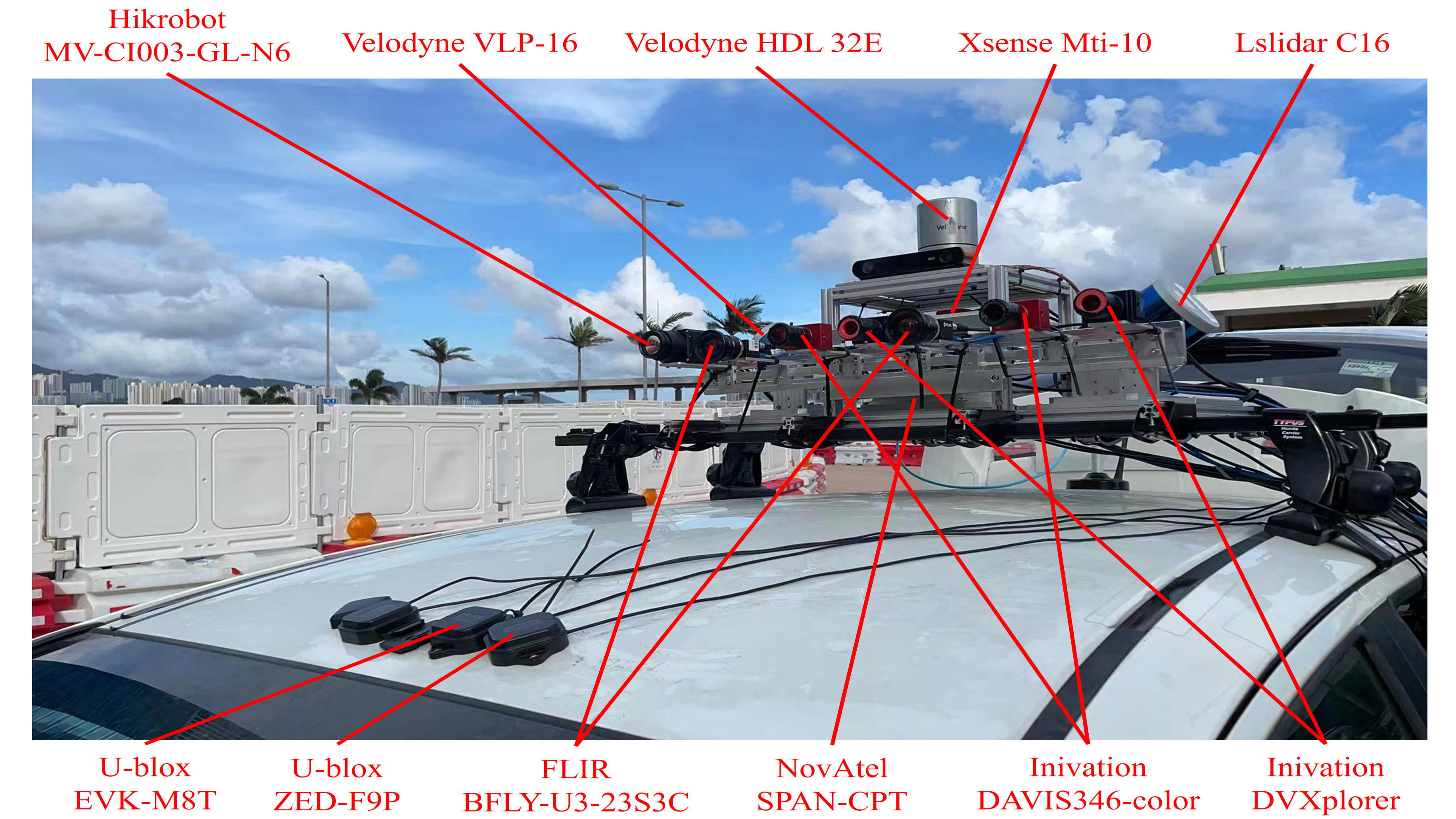
Sensor list
(1)3D LiDAR sensor (HDL 32E Velodyne)
Frequency:
10Hz
FOV:
360°(Horizontal),-30°∼10°(Vertical)
Beam:
32
Distance:
up to 80m
(1)3D LiDAR sensor (HDL 32E Velodyne)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),-30°∼10°(Vertical) |
Beam: |
32 |
Distance: |
up to 80m |
(2)Right slant LiDAR (Velodyne VLP-16)
Frequency:
10Hz
FOV:
360°(Horizontal),-15°∼15°(Vertical)
Beam:
16
Distance:
up to 100m
(2)Right slant LiDAR (Velodyne VLP-16)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),-15°∼15°(Vertical) |
Beam: |
16 |
Distance: |
up to 100m |
(3)Left slant LiDAR (Lslidar C16)
Frequency:
10Hz
FOV:
360°(Horizontal),-15°∼15°(Vertical)
Beam:
16
Distance:
up to 150m
(3)Left slant LiDAR (Lslidar C16)
Frequency: |
10Hz |
FOV: |
360°(Horizontal),-15°∼15°(Vertical) |
Beam: |
16 |
Distance: |
up to 150m |
(4)IMU (Xsens Mti-10)
Frequency:
400Hz
Accelerometer in-run Bias Instability:
15μg
Gyroscope in-run Bias Instability:
18°/h
(4)IMU (Xsens Mti-10)
Frequency: |
400Hz |
Accelerometer in-run Bias Instability: |
15μg |
Gyroscope in-run Bias Instability: |
18°/h |
(5)GNSS receivers
Quantity:
u-blox ZED-F9P(X2)
Frequency:
u-blox ZED-F9P(1Hz,10Hz)
EVK-M8T(x1)
EVK-M8T(1Hz)
NovAtel Flexpak6(x1)
NovAtel Flexpak6(1Hz)
(5)GNSS receivers
Quantity: |
u-blox ZED-F9P(X2) |
Frequency: |
u-blox ZED-F9P(1Hz,10Hz) |
|
EVK-M8T(x1) |
EVK-M8T(1Hz) |
|||
NovAtel Flexpak6(x1) |
NovAtel Flexpak6(1Hz) |
(6)RTK GNSS/INS (NovAtel SPAN-CPT)
Frequency:
1Hz
localization RMSE:
5cm
Characteristic:
post-processing using inertial explorer software
(6)RTK GNSS/INS (NovAtel SPAN-CPT)
Frequency: |
1Hz |
localization RMSE: |
5cm |
Characteristic: |
post-processing using inertial explorer software |
(7)RGB Camera (FLIR BFLY-U3-23S3C)
Quantity:
X2
Frequency:
20Fps
Resolution:
1920×1200 pixel
FOV:
96.8°(Horizontal),79.4°(Vertical)
(7)RGB Camera (FLIR BFLY-U3-23S3C)
Quantity: |
X2 |
Frequency: |
20Fps |
Resolution: |
1920×1200 pixel |
FOV: |
96.8°(Horizontal),79.4°(Vertical) |
(8)Event Camera
Inivation DAVIS346-color:
Quantity:
X2
Inivation DVXplorer:
Quantity:
X2
Frequency:
1000Hz
Frequency:
1000Hz
Resolution:
346×260 pixel
Resolution:
640×480 pixel
IMU:
MPU6150, 6-axis
IMU:
MPU6150, 6-axis
(8)Event Camera
Inivation DAVIS346-color: |
Quantity: |
X2 |
Inivation DVXplorer: |
Quantity: |
X2 |
|
Frequency: |
1000Hz |
Frequency: |
1000Hz |
|||
Resolution: |
346×260 pixel |
Resolution: |
640×480 pixel |
|||
IMU: |
MPU6150, 6-axis |
IMU: |
MPU6150, 6-axis |
Sensor setups

Calibration rosbag and Our calibration result
title1 |
title2 |
title3 |
title4 |
|---|---|---|---|
 |
 |
|
|
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Calibration:rosbag |
Our calibration result:txt
Data
Urban_day_loop |
Urban_day_unloop |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: txt |
Data: rosbag |
Groud-Truth: txt |
|
Urban_night_loop |
Urban_night_unloop |
|||
|---|---|---|---|---|
|
|
|||
|
|
||||
Data: rosbag |
Groud-Truth: rosbag |
Data: rosbag |
Groud-Truth: rosbag |
|
All topics published by automatic driving platform
| Sensors | Topics |
|---|---|
| Event cameras | /DAVIS346_left/events |
| /DAVIS346_left/image | |
| /DAVIS346_left/imu | |
| /DAVIS346_right/events | |
| /DAVIS346_right/image | |
| /DAVIS346_right/imu | |
| /DVXplorer_left/events | |
| /DVXplorer_left/imu | |
| /DVXplorer_right/events | |
| /DVXplorer_right/imu | |
| RGB cameras | /camera_left/image_raw |
| /camera_right/image_raw | |
| IMU | /imu/data |
| Mechanical LiDARs | /left/lslidar_point_cloud |
| /right/velodyne_points | |
| /velodyne_points | |
| Time synchronization | /ptp/trigger_time |